
I made a new page to keep all my Voron stuff together, you can find it here.
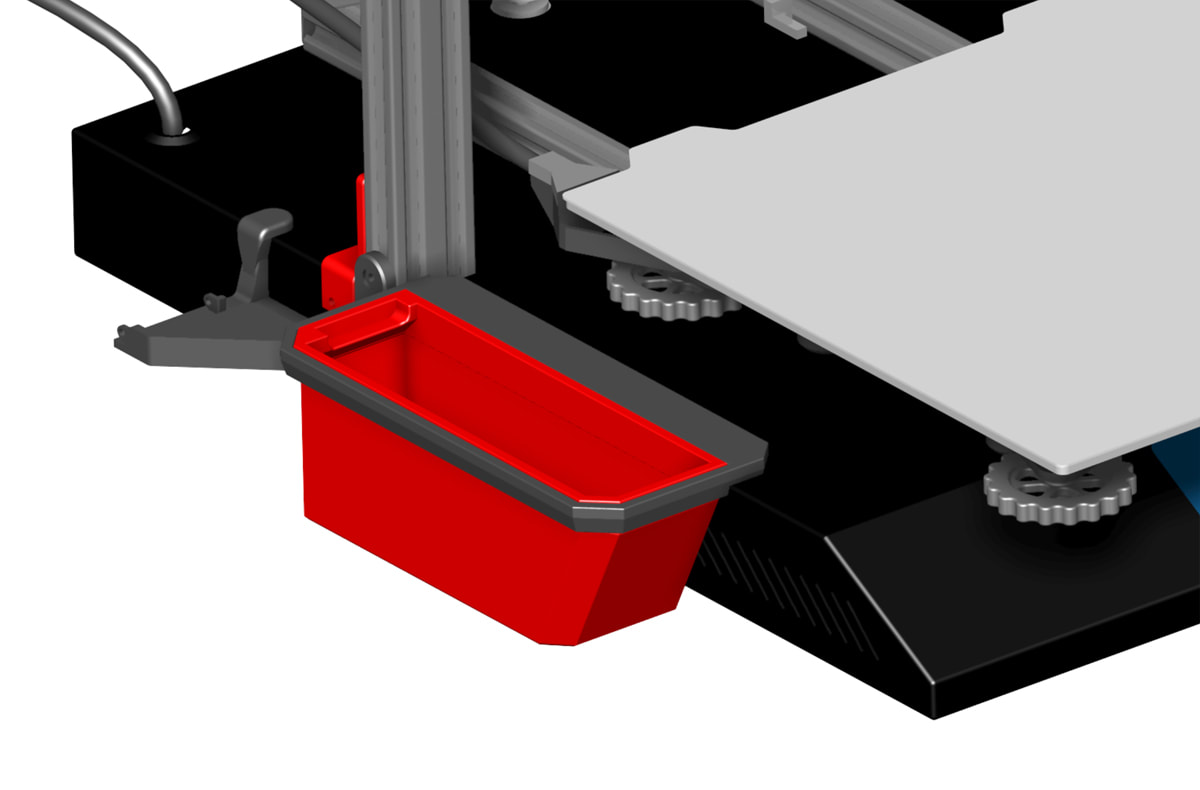
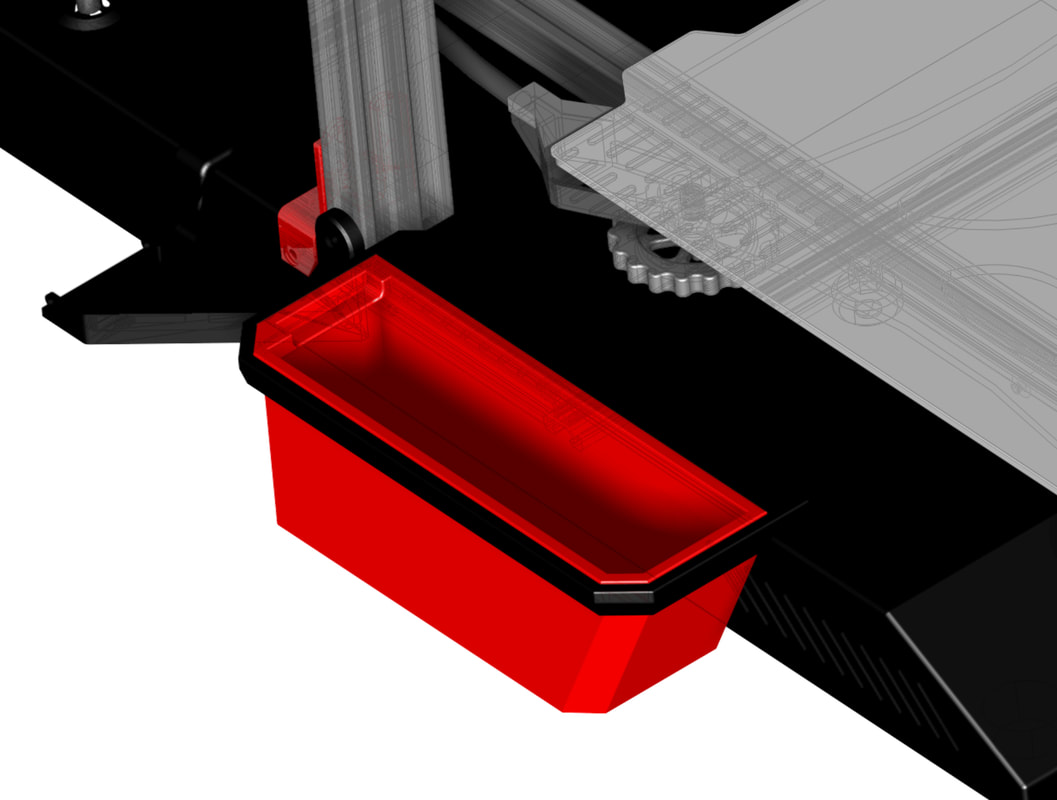
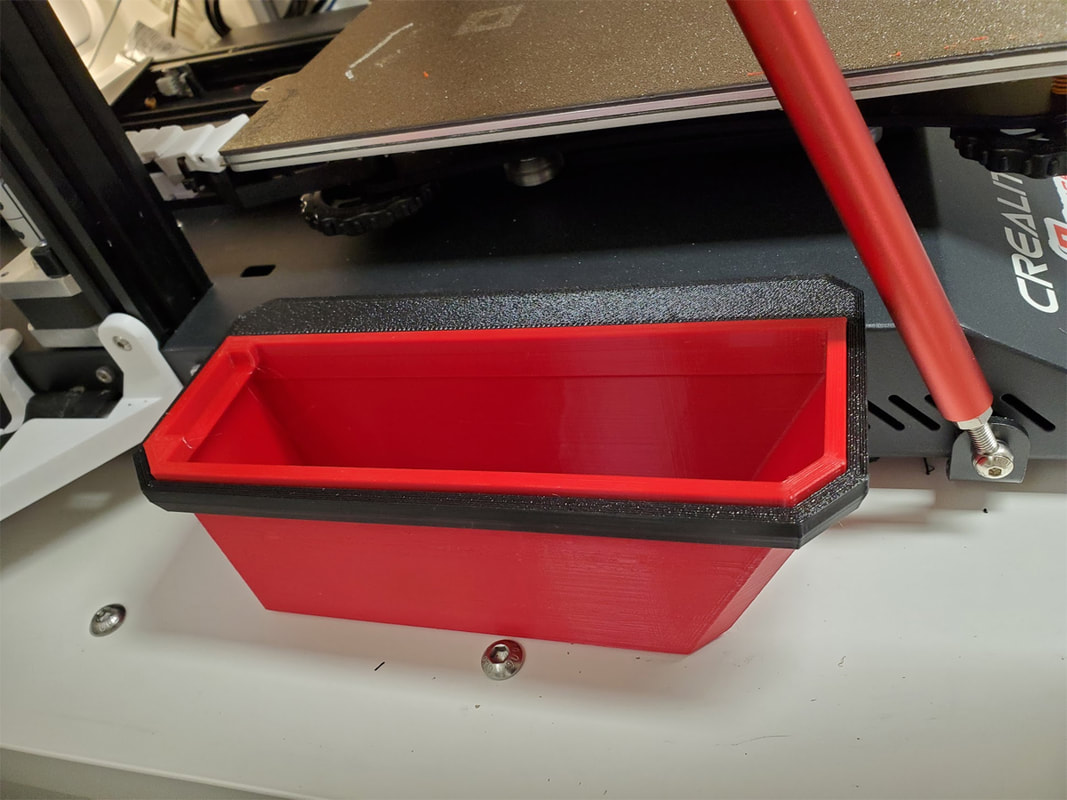 The small debris which my printer creates was getting out of hand. I normally dyson out my enclosure after a print to clean up the scraps, but thought a small bucket may be a simpler solution. I designed this while working on the belted z remix, and it just sticks on the side of the CR10S Pro using five 12x3 cylinder magnets, and it prints without supports. The magnets are held in using some superglue (I use Gorilla Superglue Gel) and I plan to glue the frame to the bucket on mine. I made one minor change between my printed part and the model posted to printables, which is to lower the height of the bucket by 1.6mm since I found that mine was just a bit too tall (my printer uses the stock feet). If the printer is raised or uses non-stock feet, it may be necessary to add something to the base or you can adjust the model since I will include the STEP file. This was printed using eSun Fire Engine Red PETG and Duramic 3D Black PETG. You can find the STL and STEP files here: www.printables.com/model/284470-scraps-bucket-for-a-creality-cr10s-pro
I use Weebly to host this site (which is free so no complaints), and they are switching over to Square (which bought them in 2018). I received an email asking me to create an account on Square, even though I did that weeks ago (yet still keep getting the emails). I also linked the site to square weeks ago, but cannot see anywhere to manage it from Square. I think I have done what was asked to keep the site going in the move to Square but am not 100% sure. I've looked through the FAQ's on how to check if the site was moved over, but anything mentioned does not seem to correspond to what I see on the dashboards. It does however look like going forward, or possibly even with the transition to Square, the blog may go "bye bye" or become unusable for me, since Square does not seem to be a blogging platform (they are e-sales). I cannot be sure though, since I cannot make heads or tails of exactly how it may or may not work with the move to square. In any case, I backed up the site, but if it does get turned into mashed potatoes with the move, I will try and get the site back up somewhere, but likely will not be rebuilding it as it was (I will probably need to move it to a blogging friendly platform).
If the worst happens, I won't be blaming Weebly though (aside from poorly explaining what should be expected). It will have been a long run with them, and they have been excellent, in fact if this is one of the last posts, let it live somewhere in the Internets as a "thank you to Weebly for hosting this Stoopid site for this long!" And thank you to anyone visiting, for stopping by to see what stoopid stuff is new. If you see this domain go dark for a while, it won't be for long since I will then be looking for a new home, and will try and get at least some of the content back up somewhere. But please be patient, there are a number of things going on, and I have a few projects as well (but the blog is important to me, so I will try and revive it somewhere if it goes away). The domain will not change regardless, it will remain as www.mystoopidstuff.com. Thanks again and Good Luck with all your projects! I just picked up some PLA for 10 bucks thanks to Reddit user Pashag3g and PLAFantastic on Twitter. I've taken advantage of several deals in the past, and picked up some cheap filament and parts for my printers, so I thought it would be helpful to post some links to the sites I check every now and then for deals. I added these to the Links and 3D Printing Tips sections as well:
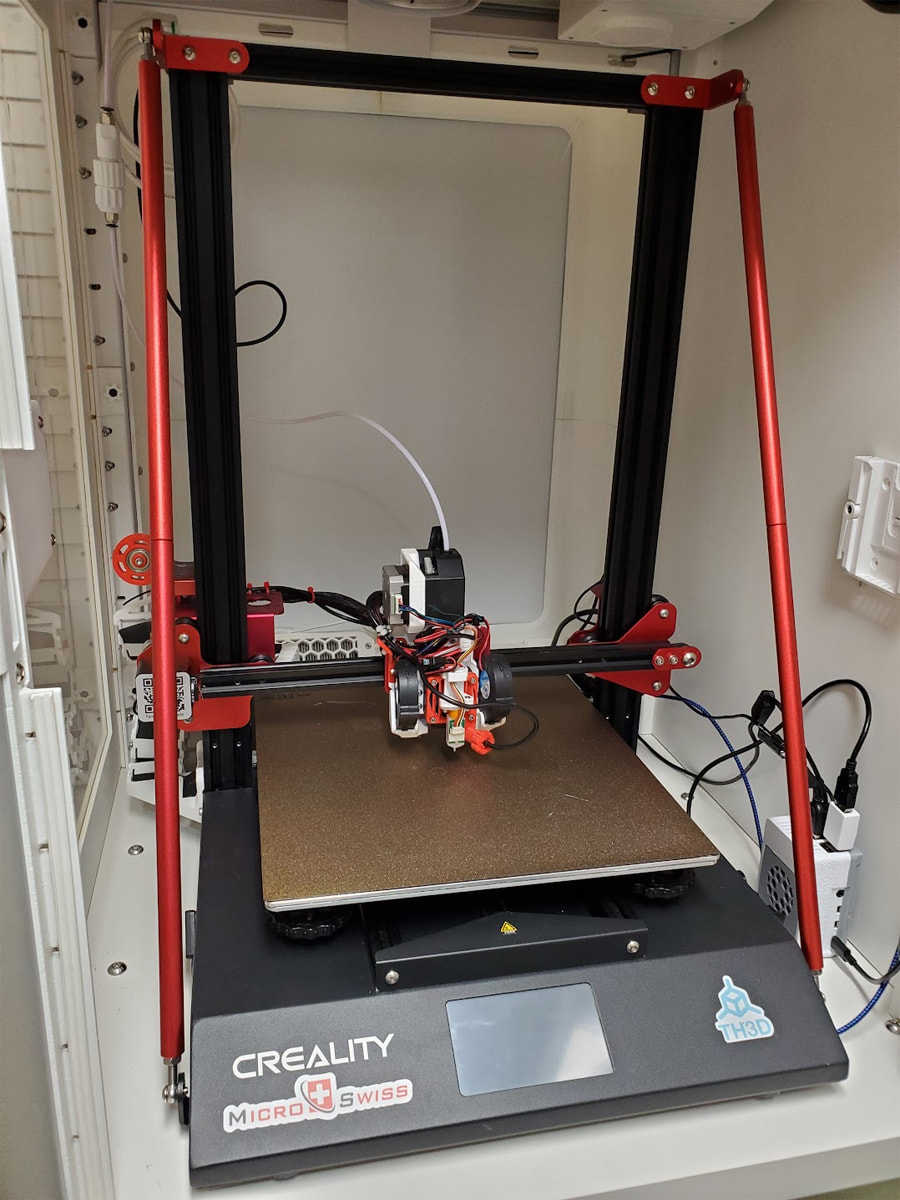
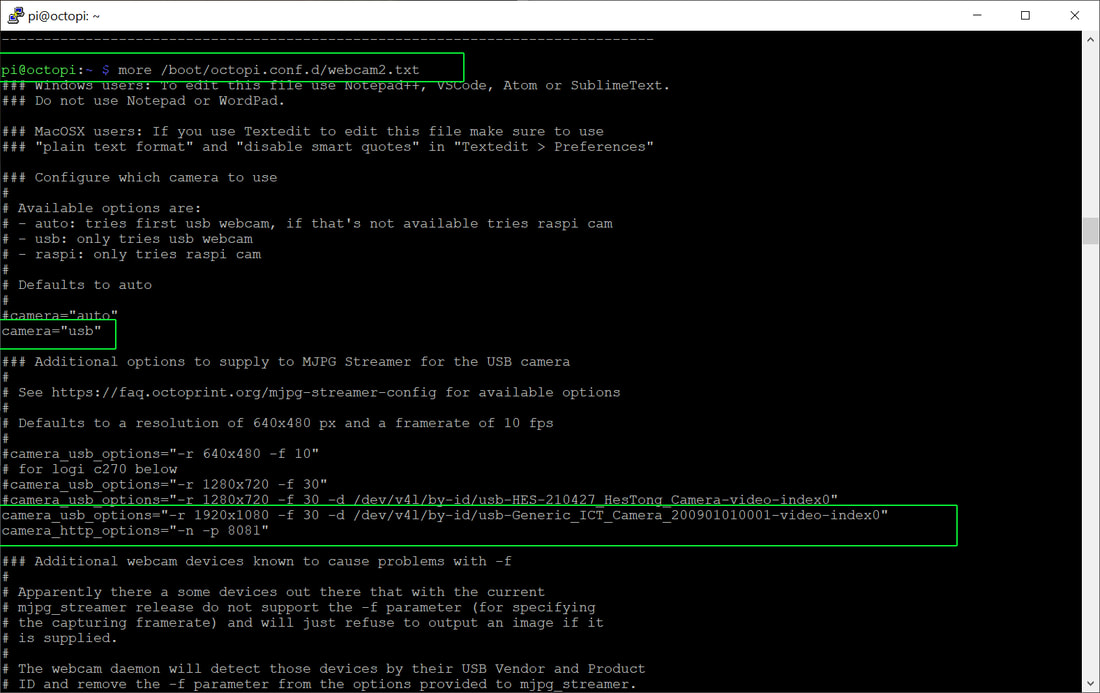
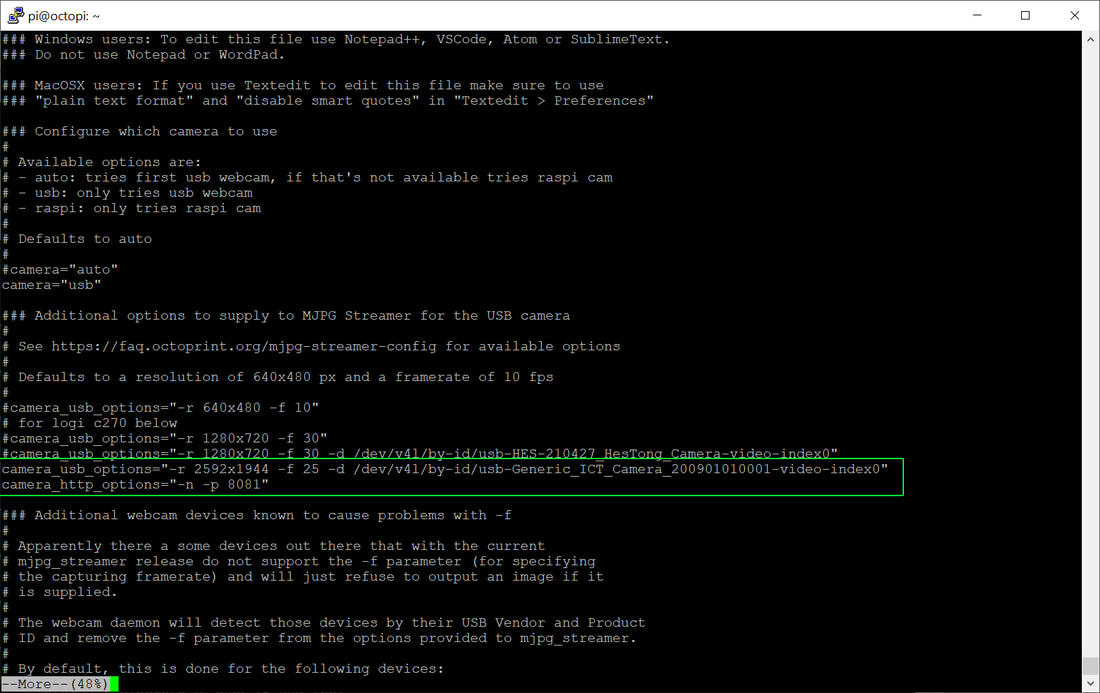
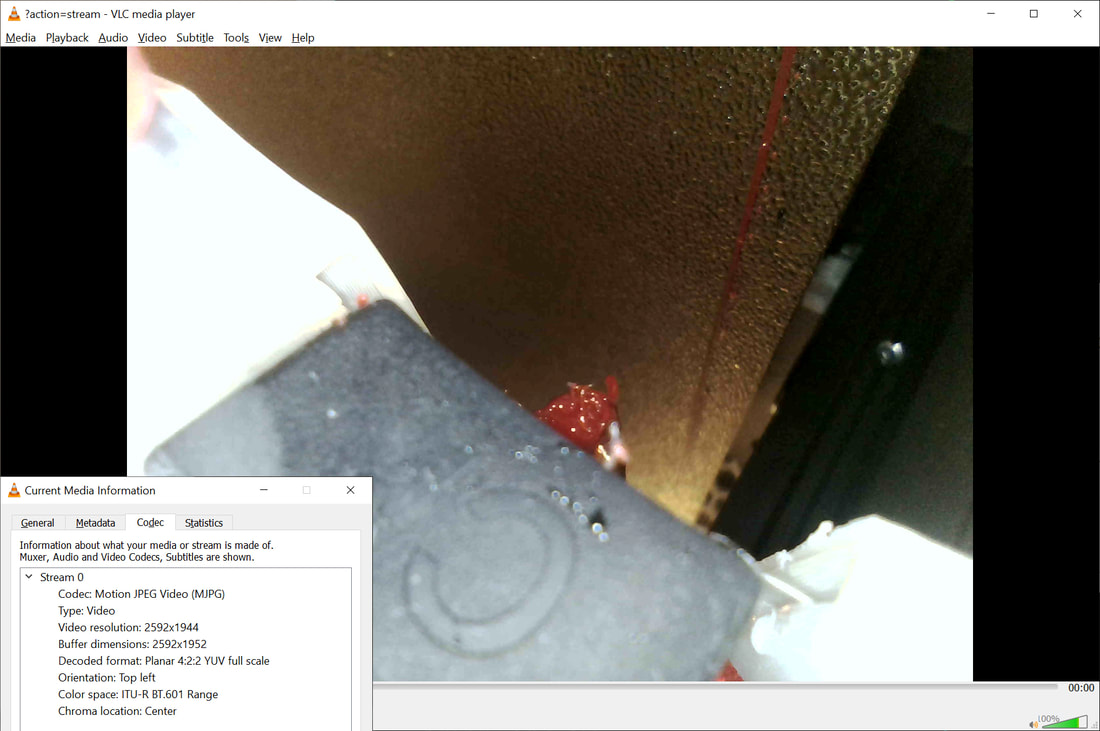
https://3dprintingdeals.com/ www.reddit.com/r/3dprintingdeals/ https://twitter.com/hashtag/PLAFantasticPLA I bought a "Zeberoxyz Red Supporting Rod Set" (616mm version) for my CR10S Pro from Amazon a few day ago, and got it set up last night. It's a very nice kit, and went together easily. The only things I added were four M3 washers for the metal brackets that mount under the front of the printer (just my preference to use washers with the screws but it's not required). The assembly is straightforward, just assemble the rods, mount the brackets and then mount the rods. On the CR10S Pro, the top mounts have to stick out about 5mm from the edge of the 2020 extrusions to remain in line with the lower mounts, but that does not seem critical. I'd suggest not trying to put much tension or compression in the rods, to avoid racking the frame since these are just additional support. Unfortunately during the install I found a pre-existing issue with the squareness of the frame on my CR10S Pro, which I will need to deal with when set up the z-belt mod on my printer. Additionally, I found that, with this kit installed, I have an interference issue with my custom hydra remixed hot end (but there would not have been any problem if I were using the stock hot end). I will need to think over the best way to re-design my hot end mount, but it should not be too difficult. Overall though, for a stock CR10S pro, I think something like this support rod kit is a great idea. It looks like Creality is including this same type of bracing on their CR10 V3, and I have seen it on other large printers as well. If you are running a custom hot end though (not stock), it would be worth checking for possible interference issues first. I just received the kit of functional printed parts for the Voron 2.4 R2, from Maker Panda on AliExpress. I bought these around the time I bought the Voron kit, but there was a lead time since they had to be printed. The customer support was excellent and they accommodated an early change I requested with no problems (changed the hot end type to a Rapido). Some of the pics show the Rapido set in the Stealthburner mount to test the fit (which is perfect). I probably could not print parts this nice in ABS on my printers since even though my CR10S pro is enclosed, it does not warm up that much inside the enclosure. I also really dislike printing ABS, and getting the parts will save a lot of time. There are of course some minor cosmetic issues which are just things like zits or inconsistent flow showing up here and there, but the pictures don't do the parts justice really. In person they look great and feel well made. They are also well organized with labels showing what's in each bag, and they were packed with a great amount of care so nothing got damaged. I did not get anything for posting this, just putting info out there. I plan to update this once I start to assemble the printer. Update 4/2/2023 - It's been a while, but the Voron is getting built, and I'm still really pleased with these printed parts. There have been zero issues with fit so far, with the Z-axis parts installed currently. I'd recommend these parts to anyone who wants to build a Voron, but wants to avoid printing ABS. 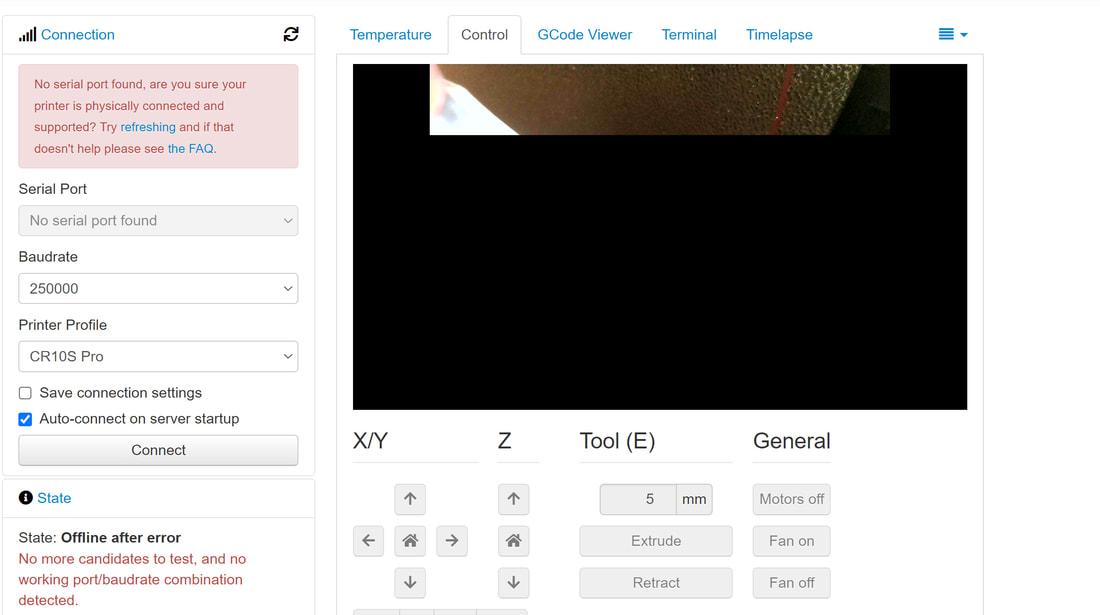 I recently received a DEPSTECH Endoscope Camera 1944P which I had ordered from AliExpress several weeks ago. I want to disassemble the camera, and see if it can be better integrated as a nozzle camera for my printer. But before I start hacking away, I thought I should get a baseline to see if and how it works. It seems to be a mixed bag so far though, the camera seems to cut out at the slightest movement and I have had the screen blank out multiple times (edit: see updates below, this seems to be an issue with the Pi). That sucks because the image quality is pretty good, and I could see this being a good candidate for a nozzle camera. I'm still testing it though, and will have to try it on another device to make sure the issues are related to the Pi. But here is a bit of how I set it up and some pics of it in action. Pardon the upside down shots of the nozzle, I did not mount it, just had it sitting next to the nozzle and the point was just to check the resolution and image quality. To set up the cam, you can refer to this post, which goes into more depth on multicam setup, but in a nutshell: 1. First connect the camera to the USB port where it will be plugged in and boot the Pi. If you already have a camera configured, check out the multicam setup info from the Octoprint docs, or my prior post linked above. 2. I already had a file named webcam2.txt set up (which is required for multicam) and it lives here: /boot/octopi.conf.d/webcam2.txt 3. I ran "ls /dev/v4l/by-id/" to first get the long name (what I would call it) for the endoscope camera, which is: "/dev/v4l/by-id/usb-Generic_ICT_Camera_200901010001-video-index0":  4. Next I checked to see what formats are supported by the camera, I tried 1080P at 30fps and 1944P at 25fps to test with "v4l2-ctl --list-formats-ext": 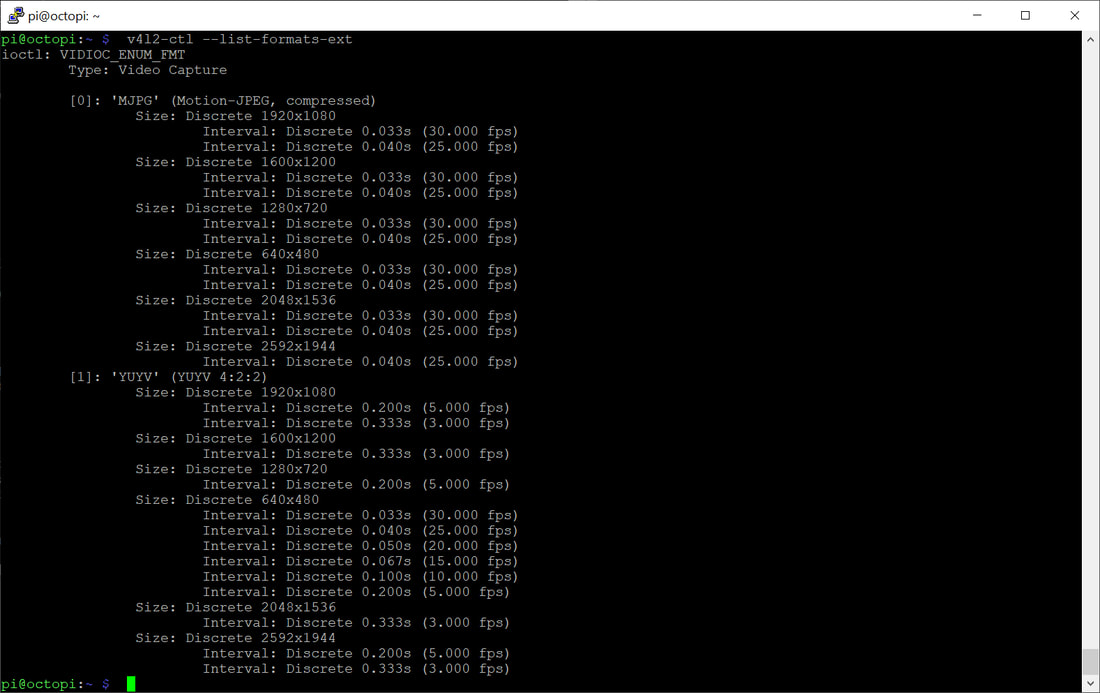 Now I had the info to update the /boot/octopi.conf.d/webcam2.txt which again is for the 2nd camera (multicam) and a file I had to previously create. I just commented out the config for my other endoscope camera (by placing a "#" before the line to ignore), and set up the new one on the next line down (circled in green in the pic below). I first tried 1080P at 30fps:
And then I tested it using 1944P at 25fps by re-editing the same file (/boot/octopi.conf.d/webcam2.txt). Should also note that in order for the changes to take effect first the file must be saved and after that the webcamd service needs to be restarted, or the Pi can be rebooted. For some reason restarting the service seemed to hang on my Pi so I rebooted it, and this again could be part of my problems with stability. I will probably try a fresh image and rebuild things when I get some free time.
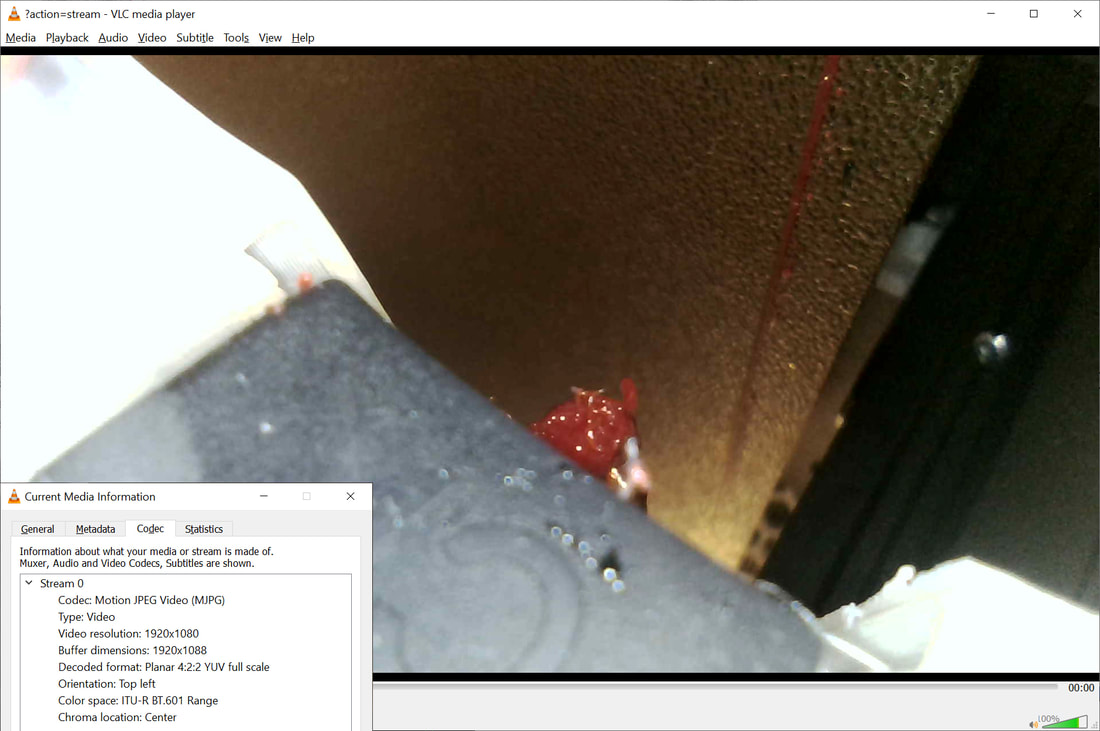
The image quality is pretty decent and the autofocus seems to work. The test image is not the best composition, but again this is a quick test and I already have some issues with stability I need to look into further. The Pi's CPU seems to be running OK and the temp is around 41.8°C which I "think" is normal. The image however seems to lock up (see below pic), and I have to restart the stream to get it back, which could be either the Pi or the camera. I also noticed that when I was working on the camera to position it, the stream would drop more frequently. It is also very likely though that the issue is related to power, so I will also need to try a more robust power supply (my Pi complains of undervoltage but the reasons why I have not fixed that in the Pi's normal location is another story). So the endoscope does what it says and the image quality seems good. The issues with it locking up again may be my Pi or related to power, so I need to test further. However I did not have issues though with my current cameras (two actually), and for testing this, I was only running the new Depstech endoscope camera. I hope I can resolve this and will update what I find. (Edit, I suspect the Pi is the issue, see the last update below).
UPDATE 9/17/2022: I still need to test this camera on another device to see if the cut outs are due to the camera or the host it was connected to. However last night I ordered this camera, which I think could be used as a nozzle camera, and it has some benefits over the endoscope types of cameras for mounting and cooling. The problem however may be (edit) the focal length, but it may be that a small lens could be used to get a close view so I am also gonna order some cheap lenses to test it with. If it works I will post some updated designs and may try to work the camera into the stealthburner (that is the ultimate goal at least), but I will first try it out on the CR10S Pro. UPDATE 10/7/2022: I did not test the endoscope camera on another device, but I have since experienced this same issue with another camera on the Pi, so I suspect the issue is with the Pi. I found this post on the Octoprint Community Forum and it looks like something I should try. I will test it again if the issue can be resolved on the Pi. UPDATED 10/8/2022: Well this is strange, but I have been testing the other camera I have (OV5640), which has also been locking up. I tried changing "type=forking" to "type=simple" but that had the effect of causing webcamd to reset every few seconds. I then found this post by Foosel (Octoprint creator) and it says that the type should be "simple", however (again) with "simple" webcamd restarts constantly. So the behavior I am seeing appears to be opposite what was reported in the linked thread (simple causes webcamd to restart constantly and forked seems to be stable, but locks up). I may end up re-imaging the pi with the latest version (I am running 1.8.4 currently on this pi). In any case, the issues with the locking up on the cameras seems to be related to the Pi/Octoprint and not something wrong with the cameras.
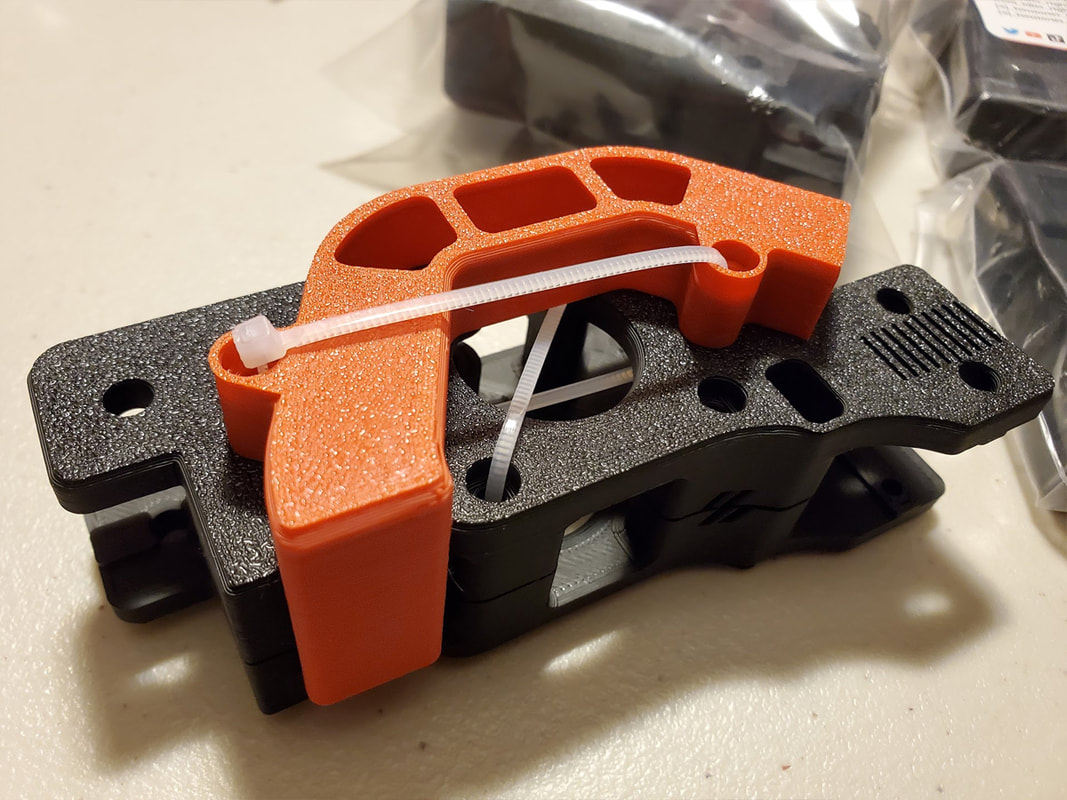
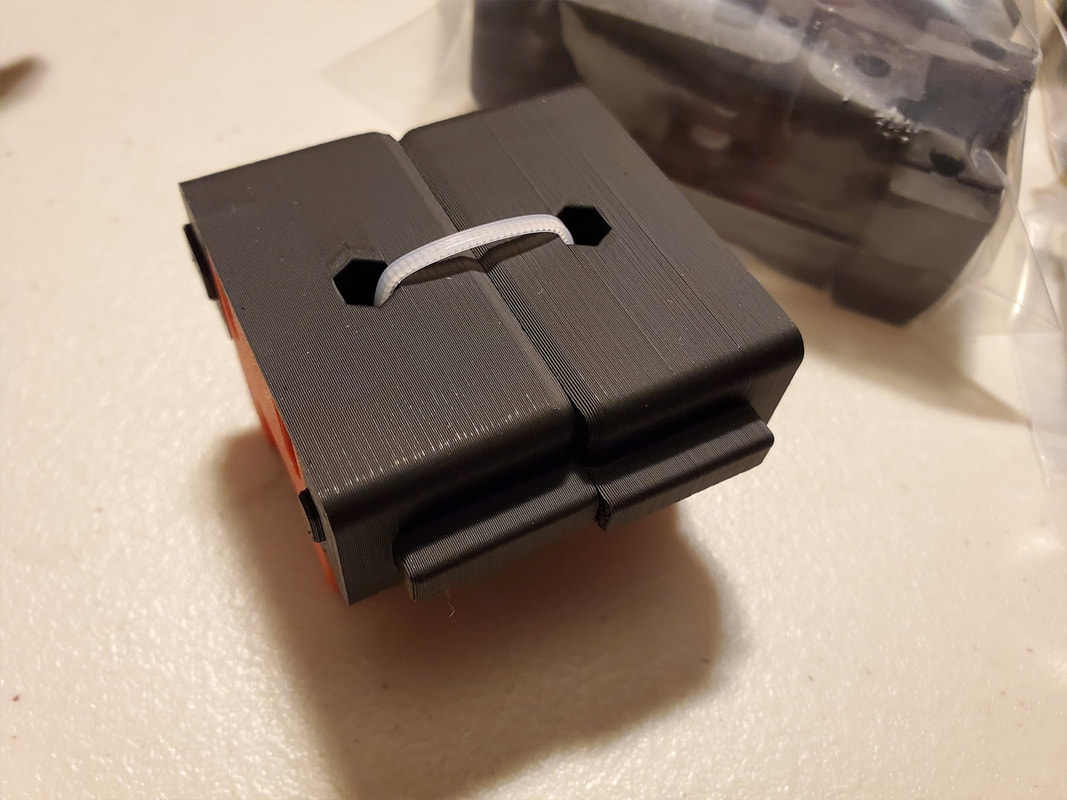
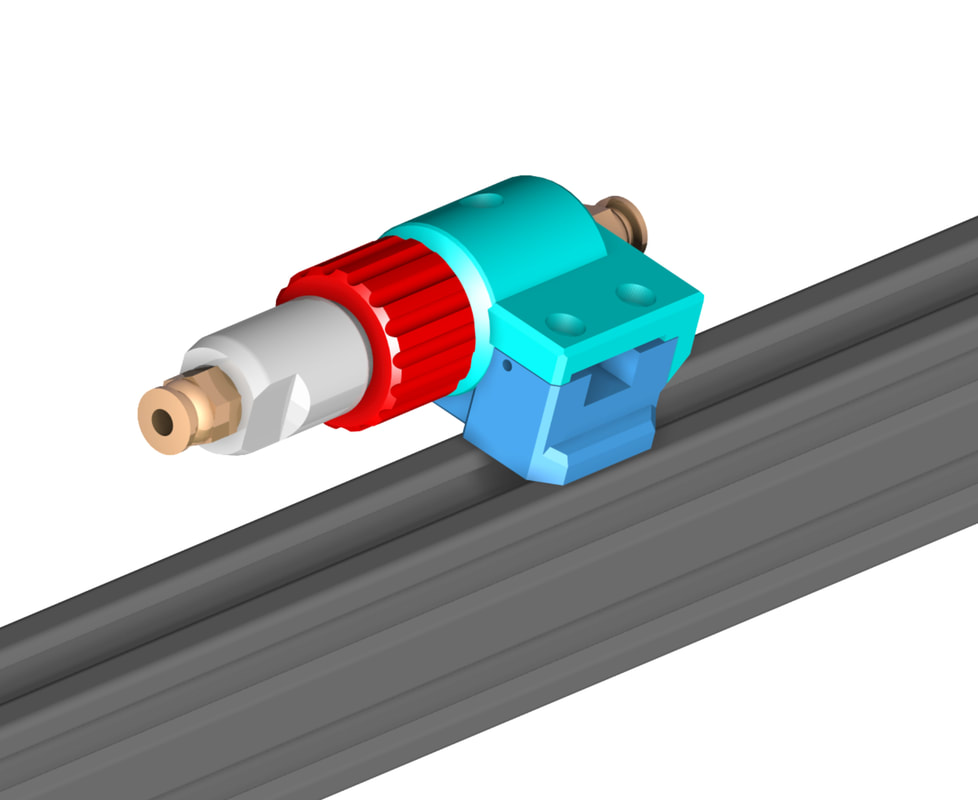
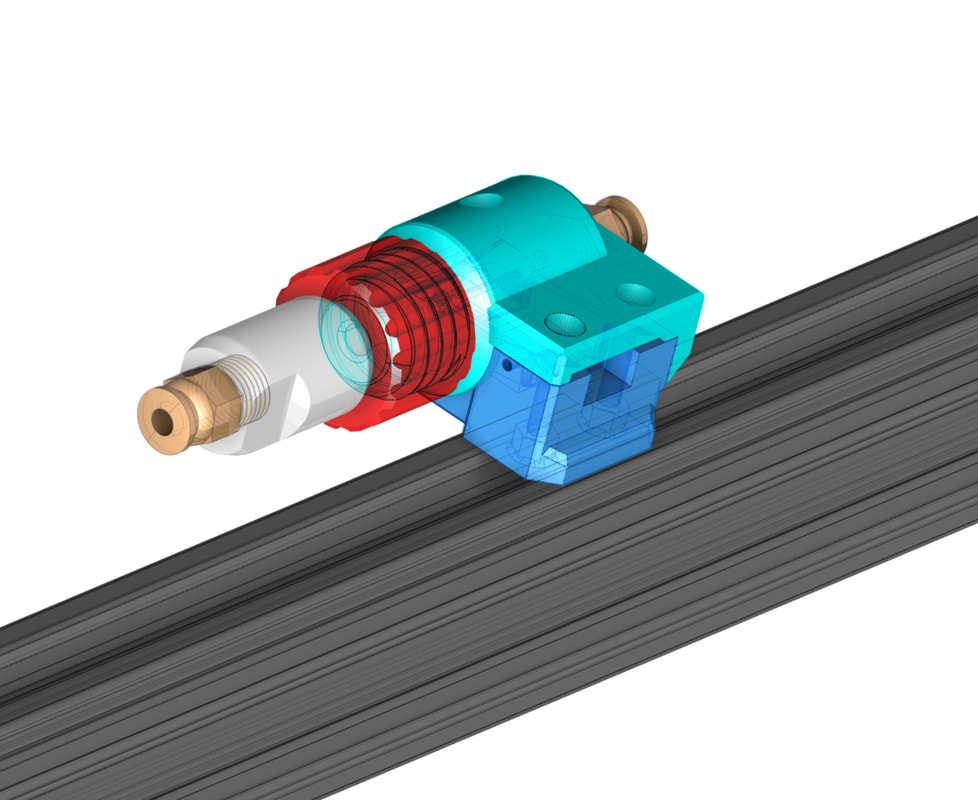
That is a long title, and it may not be the best. Anyway, this thing is a filament runout sensory which should work with a stock CR10S (and maybe others?). The design uses a pair of PC4-M10 couplers with the output side of the sensor having a quick disconnect which can be unscrewed. The reason for the quick disconnect is to be able to get access to the filament to assist with unloading a direct drive extruder (it's not always necessary but sometimes it can help to have access to the filament closer to the hot end on a direct drive).
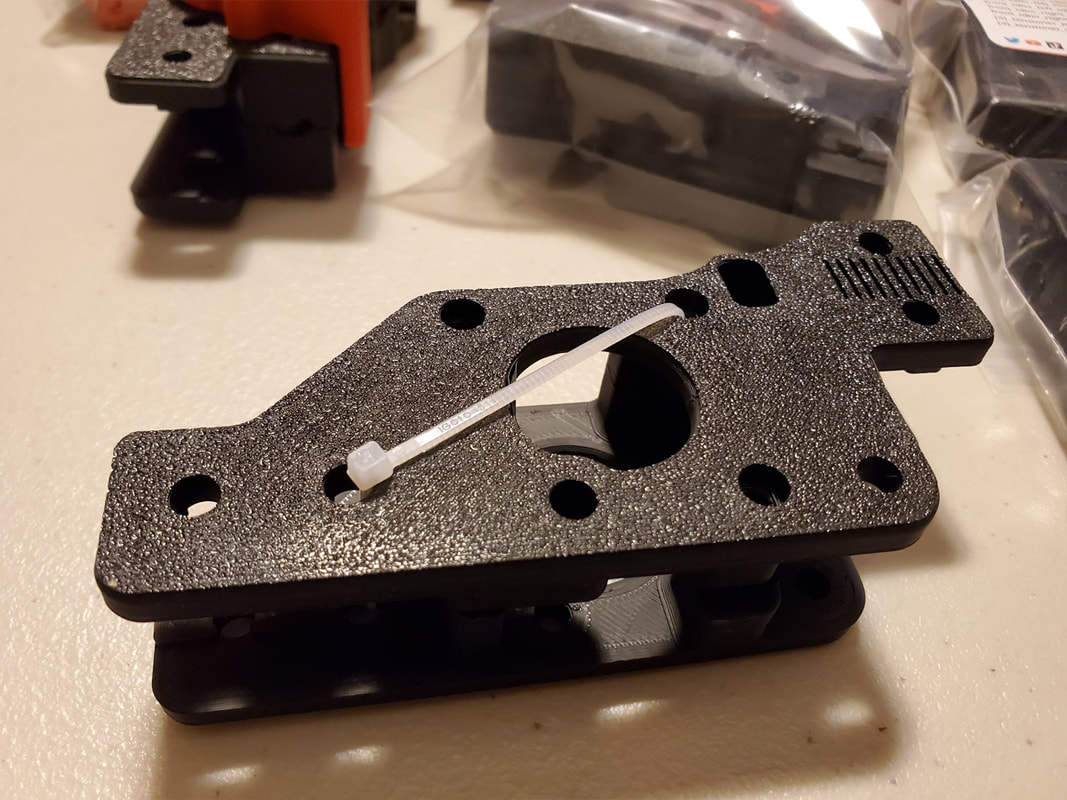
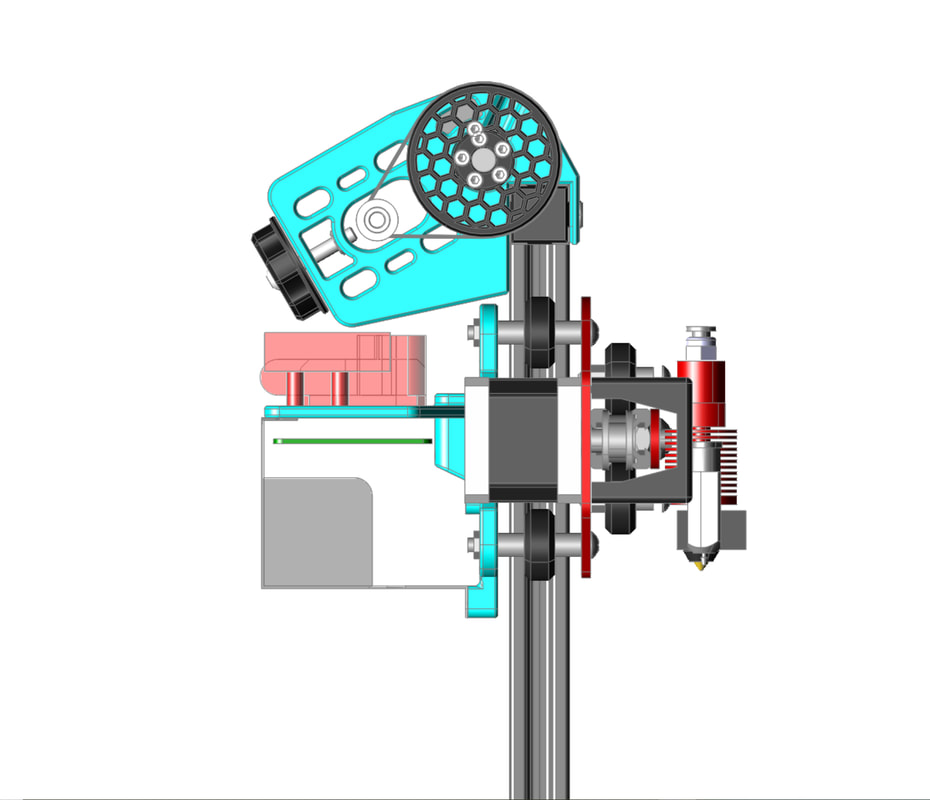
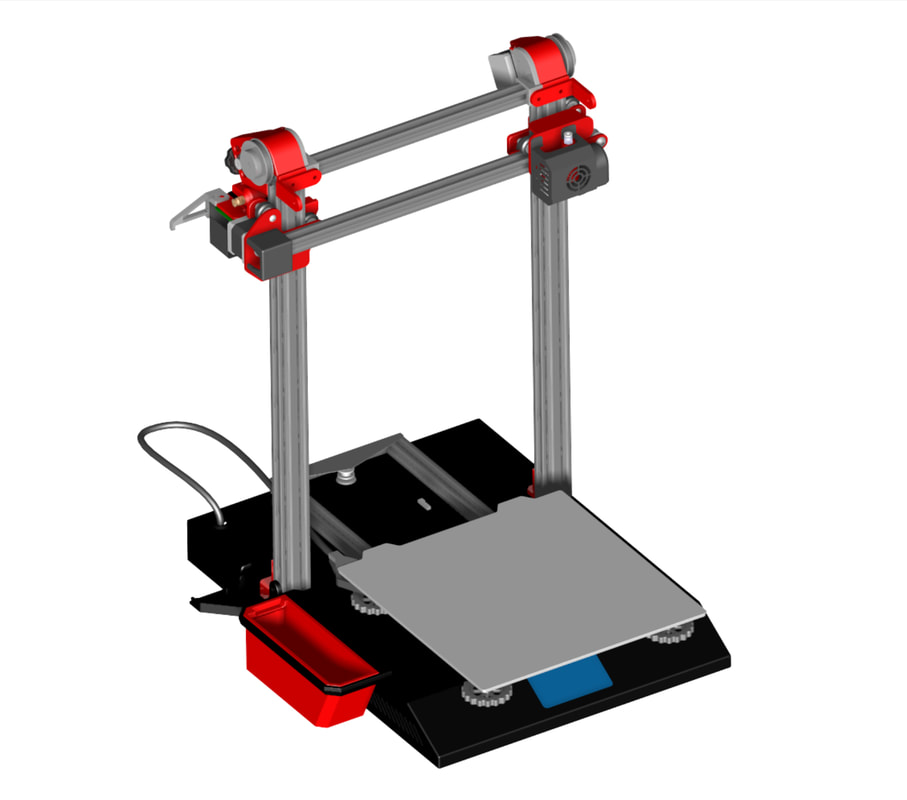
Why unscrew the coupler instead of just releasing the Bowden from the coupler? For one, the couplers generally suck, and I have had more than one that held onto a Bowden tube and would not release or not without difficulty. The other reason is that eventually the tube will get chewed up if it is removed too often. To design this remix, I used the "Creality CR-10S Ultimate Filament Run Out censor With Z Axis Cable Guide" by 3Deddy at Thingiverse, along with my Bowden coupler. My plan is to use it with my CR10S Pro which I believe uses the same filament sensor as the CR10S (but I have to verify this when I get some time and my printer is free). It looks like Creality uses the same sensor for different printers so I expect it will work fine, and if not I can modify it to work. I have printed a version of this, and then went back and optimized it a bit to use fewer supports (but there will still be supports needed). This version will be mountable on a 2020 extrusion using some M3x25mm cap head screws. If it works I will post it at either Thingiverse or Printables. Updated 9/14/2022 to remove "PC4-01" and add the correct type of coupler, which is "PC4-M10" (with a link to a product). 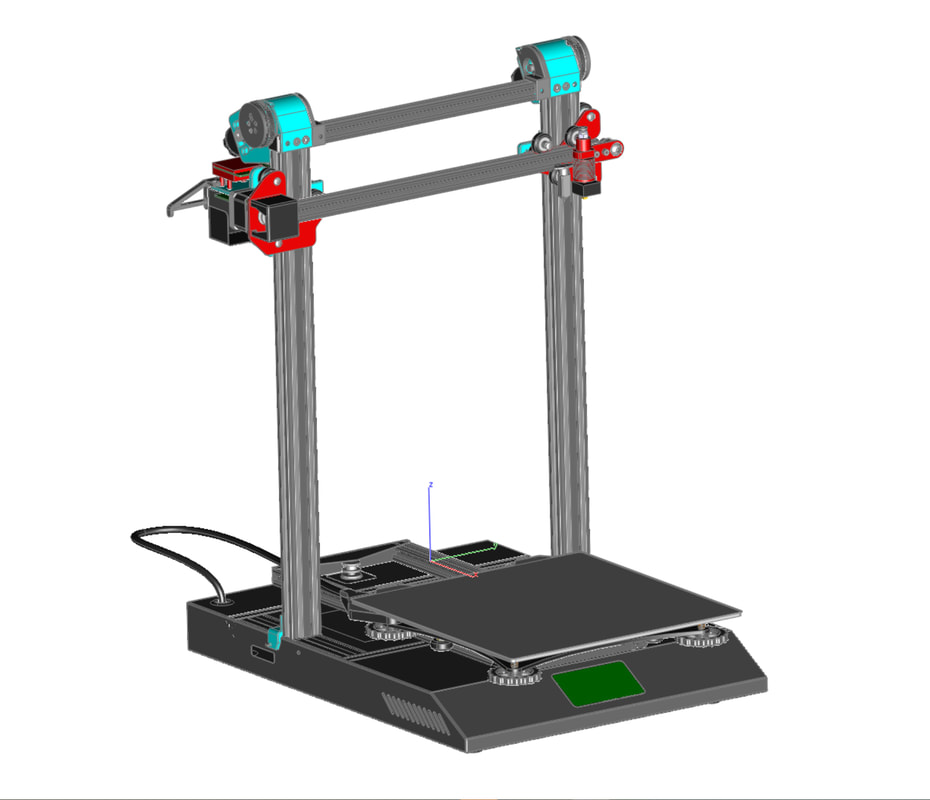 I ordered a kit to allow me to remove the z leadscrews on my CR10S Pro and swap them for belts. There are a number of reasons to do this and a number of reasons not to, but I'm gonna give it a try. The design is a remix of Kevinakasam's Belt Driven Ender 3/Pro/V2 and CR10 which is posted to Thingiverse and his Github. I am specifically using the UltraLow Profile version 3.6 as a basis for this remix. I also used Captain_Falafel's detailed CR10S Pro model to help remix the parts (also pictured), which was a great help. The parts should be 99% done, but I have to print and test it before I can post it (which will be as a remix on Thingiverse). I should be getting the hardware in a day or two as well. I only need to see what the hole spacing will be from a support rod kit, which I also am waiting on for the same printer, since that will sandwich over the mounts for the transmission (and the holes will need to line up). I went a bit overboard though and added a few extra things to the existing models and made some slight changes to help them print with fewer supports. The largest part of the modification though was the left side carriage which required moving the stepper and filament sensor down a bit, in order to accommodate the transmission parts. I should have retained the full 400mm height with this, but I will have to see. I also designed this to still work with my cable chain remix which is unfortunately only for the CR10S Pro V1. Update 9/11/2022: There is a bit more progress and some changes to the design. I decided that since I don't use the stock extruder, I would make a version for a direct drive, and since the stock filament runout sensor does not allow for using a Bowden connector, I used the "Creality CR-10S Ultimate Filament Run Out censor With Z Axis Cable Guide" by 3Deddy at Thingiverse, along with my Bowden coupler, to make a filament sensor housing for the CR10S Pro which would allow me to quickly disconnect the Bowden tube from the filament sensor in the event of a break, or to remove the filament quicker during unloading. A bit of cable management was also added to replace the stock cable management on the CR10S Pro which uses the left carriage which is getting replaced. There are a few changes to the transmission housing as well, with it being narrowed down by a bit which will allow me to better use the 65mm rods I will get in the kit, with some aluminum 80 tooth gears (since with the stock design it's a bit tight on the length when using the aluminum gears). I also removed a pocket which was meant for the printed 80 tooth gear and some other minor things. I have printed a few parts already to test things and am really impressed with the fit of Kevinakasam's original design, it's really good and the parts work very well. 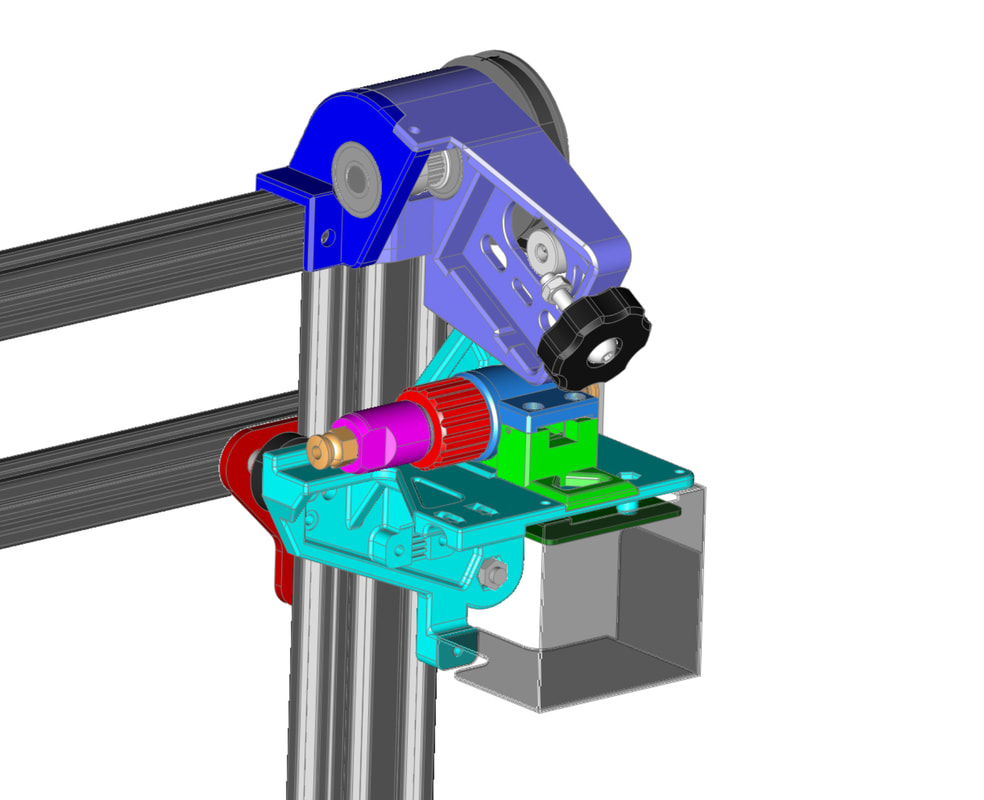 Update 9/13/2022: There have been a few changes, and the design is now ready to print. The changes are primarily to help with printability, or to add some strengthening to the modified parts for the CR10S Pro, but also to allow the use of a bracing kit on the CR10S Pro. There is at least a few other usability changes which may or may not work out, such as a view port on the belt tension adjuster (with some markings at 1mm intervals), an update to the ribbon cable management attachment and modifying the lower belt idler holders to make use of the threaded holes in the 2040 extrusions, whcih may help with mounting (they will also have some T-nuts though). I picked up some "Fire Engine Red" e-Sun Red PETG, which prints nicely and is a deep red which almost matches the anodized parts on the printer (edit: depends on the lighting), so I will be printing most of the parts in that (I plan to use it to make some parts for the Voron as well). Because PETG is not as strong as PLA I plan to print these with at least 3-4 walls and 60% infill on structural parts, with a 0.6mm nozzle. Ideally I would use ABS or ASA, but I don't run those materials much due to the smell and these parts should be beefy enough that PETG will work OK. 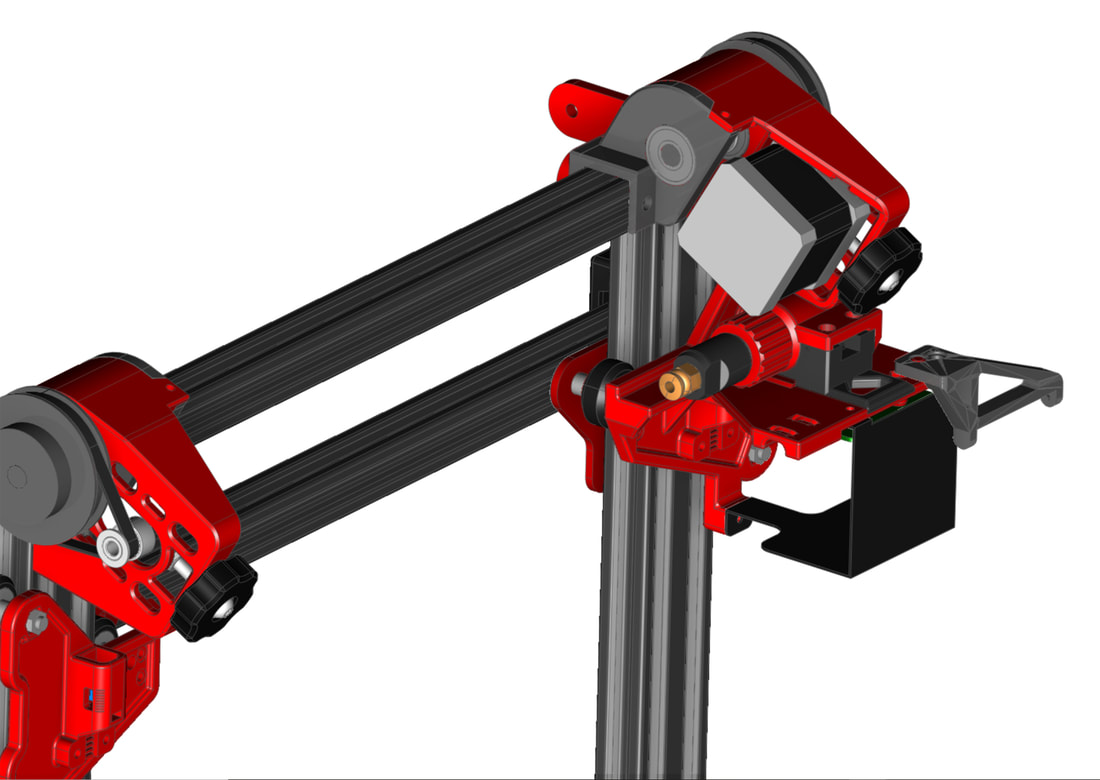
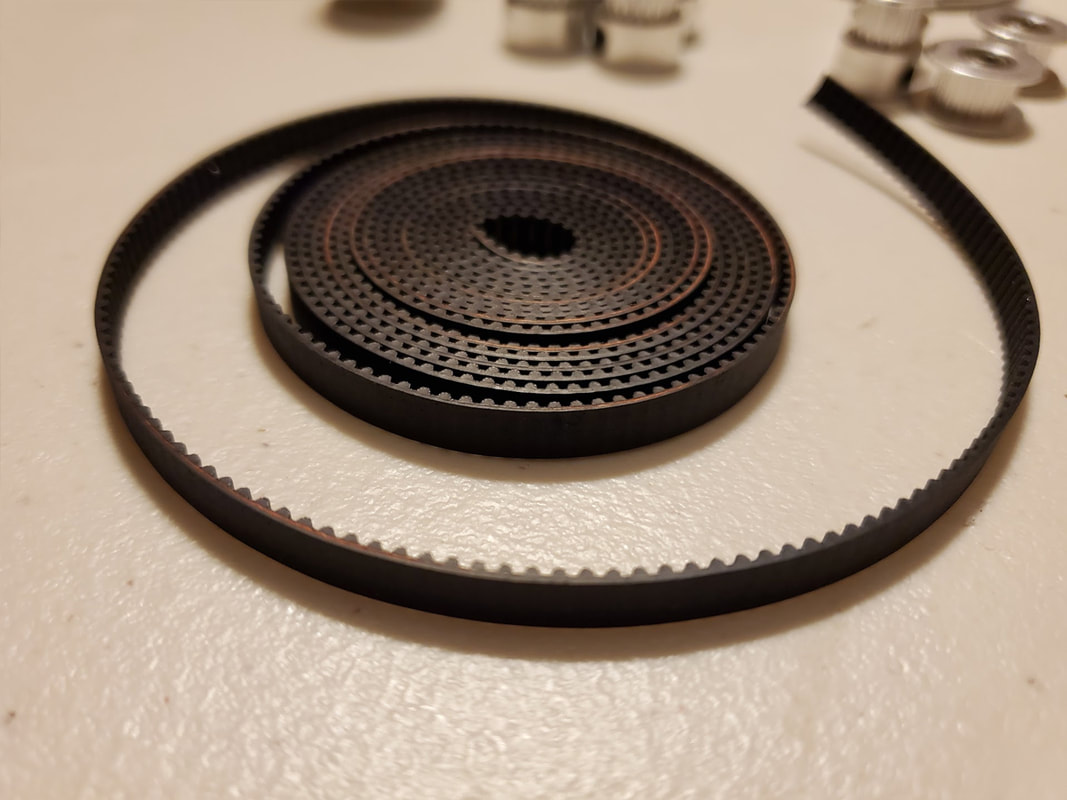
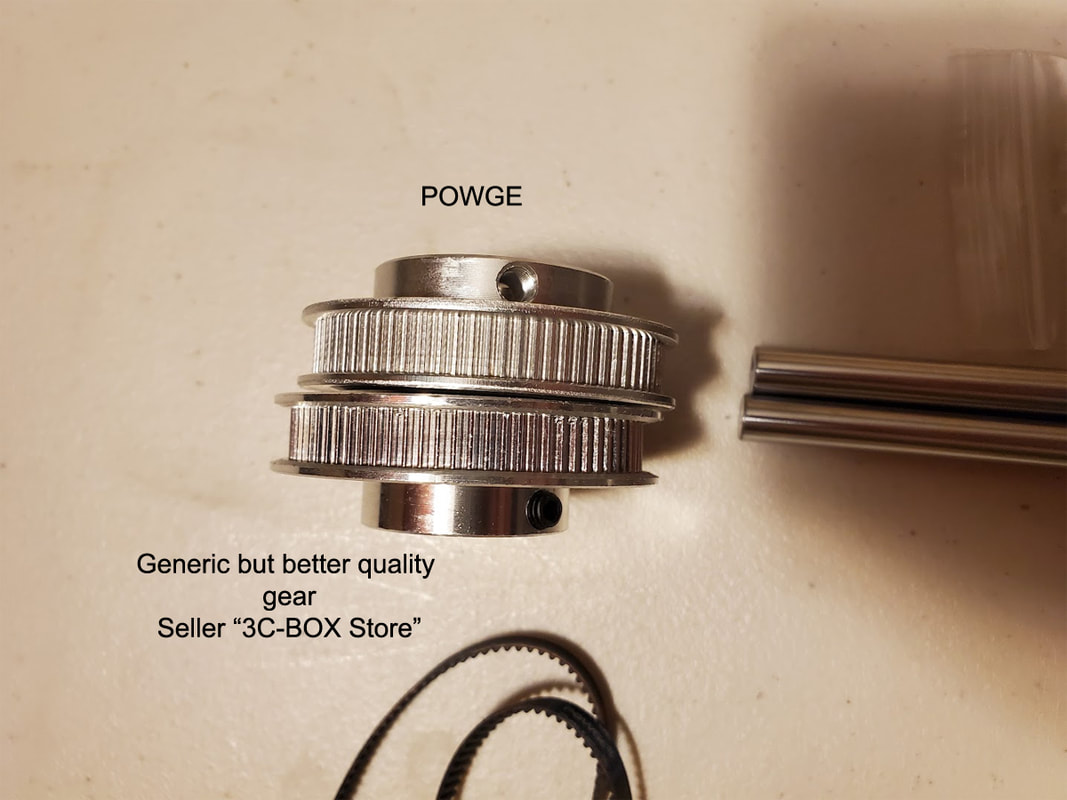
Update 9/14/2022: I was happy to find that the kit I ordered from AliExpress with the parts for Kevinakasam's belt driven Ender3 design had arrived (I ordered the kit from Powge on AliExpress which is just a seller who compiled the parts for the design, but AFAIK has no affiliation with the designer). Unfortunately, when I opened the package and examined the parts, what I found was a disappointment. I purchased some aluminum 80 tooth GT2 gears (with 8mm holes) along with the kit (also from Powge), and they had sharp edges which required about 10 minutes to deburr (and I did it poorly since I only have a cheap tool). I will probably need to chuck them in a drill and sand the edges to clean it up. That was not the worst however, the 65mm dowel pins have rust and one has a large pit in the surface. Rounding out the kit was the more generic stuff which is hard to mess up, and that was mostly OK. The 608 bearings are usually cheap, but I have my doubts about these since the metal looks darker than most of the ones I have bought in the past, but will need to take a closer look before I decide if they will be used for this project or not. Update - I checked the bearings and compared them to some which I already have. The Powge supplied bearings are noticeably less smooth than other cheap bearings I already have, so I will not be using the ones from the kit. I checked the idler pulleys and they are OK. The included belts are no-name, with literally no markings on the main drive GT2 belt. The loop belts are branded as "Powge", which was expected, but seeing the quality of the other parts makes these questionable as well. For the price, I would recommend sourcing the parts separately. I bought one extra 80 tooth GT2 gear from another seller, and the gear I received was much better quality and a bit cheaper too. I think I can probably still use the dowel pins but will need to remove the rust and probably paint the ends so they don't corrode further. Update 9/14/2022: To their credit, Powge said they would send me some new 8x65mm pins to replace the rusted and pitted pins they sent me with the kit (Edit - communication with the seller was challenging, they asked me to pay a buck to get the replacement rods sent, which I refused, so they said they will ship them but it will be slow :D). I also let them know about the sharp edges on the 80 tooth gears, and told them that I deburred them myself, so I won't be asking for a replacement on that item. I also ordered some M8x65 stainless pins just in case there is a problem. I'm not gonna let the rusty pins stop the build, but will replace them when I get the new ones. Update 9/15/2022: Just a quick update. I'm printing parts and so far things are working. I'm planning to print all the parts in the "Fire Engine Red" PETG first and then will do the rest in black PETG. Since the parts take hours to print, I took some time to design a bin for the scraps that always accumulate around the printer. It is designed to print in 2 parts to avoid any supports, and uses five 12x3mm cylinder magnets to hold it on the base of the CR10S Pro.
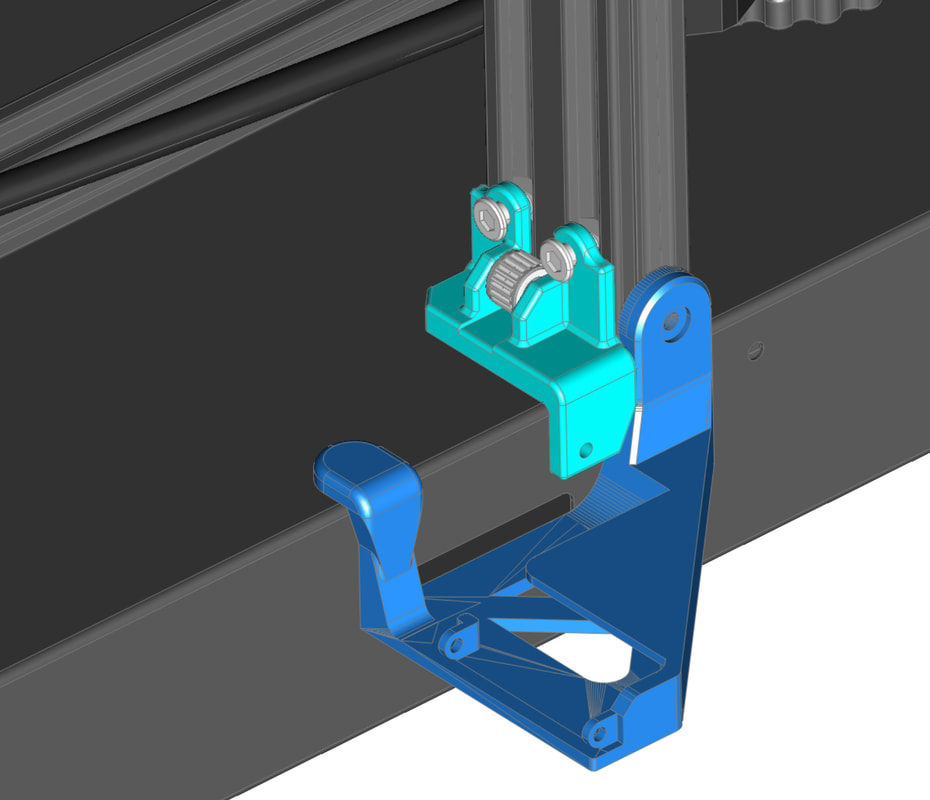
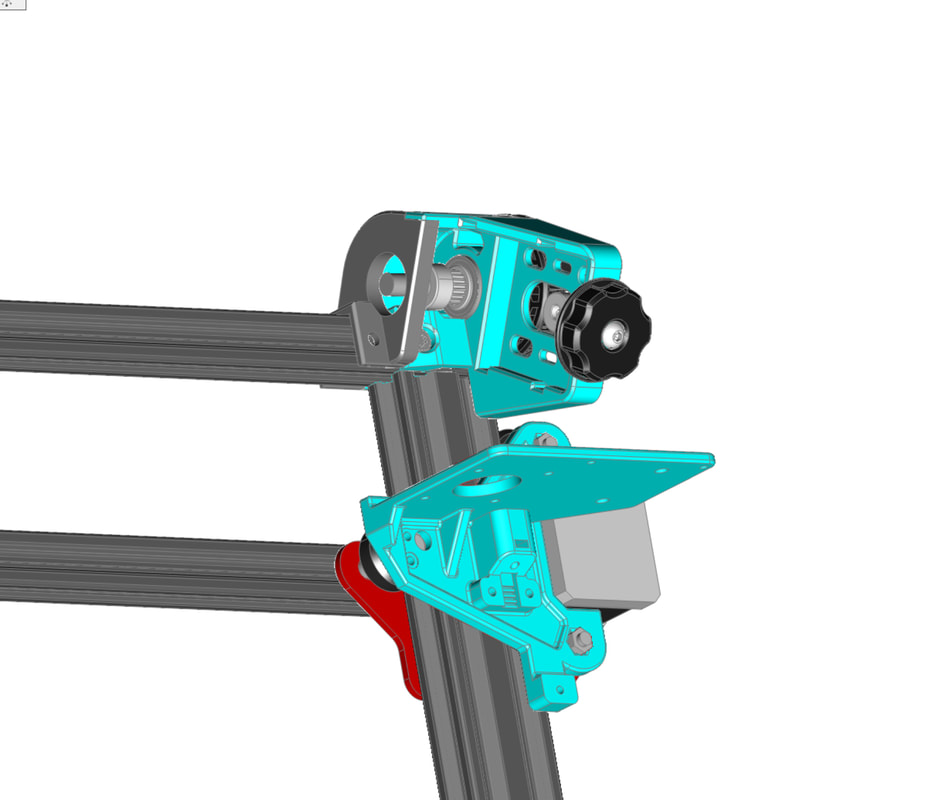
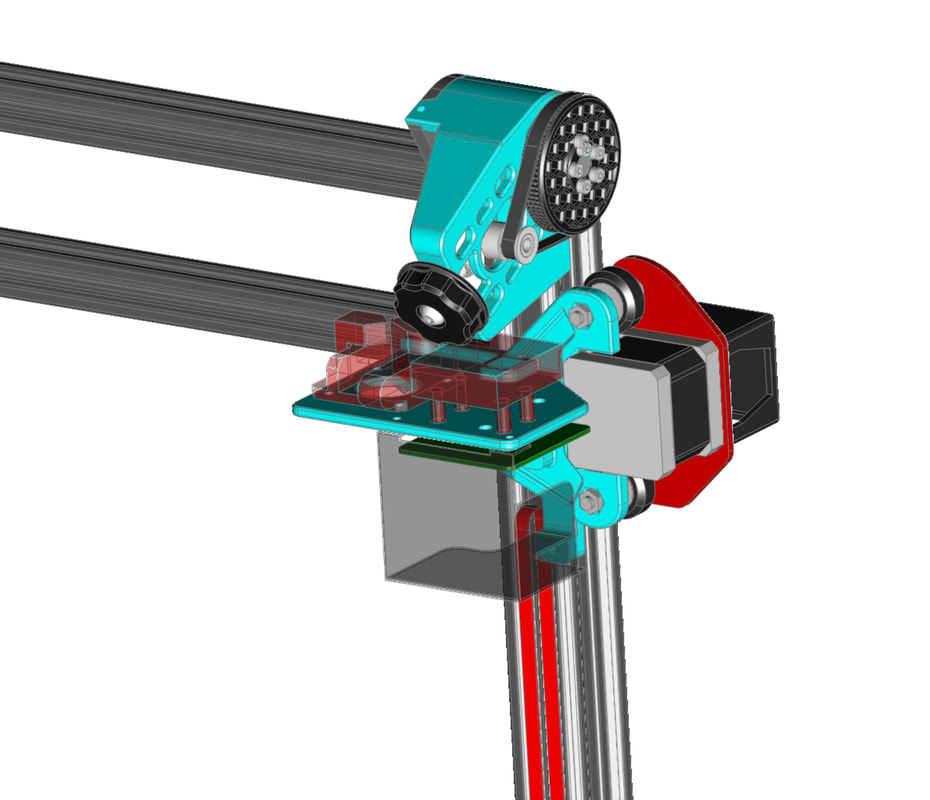
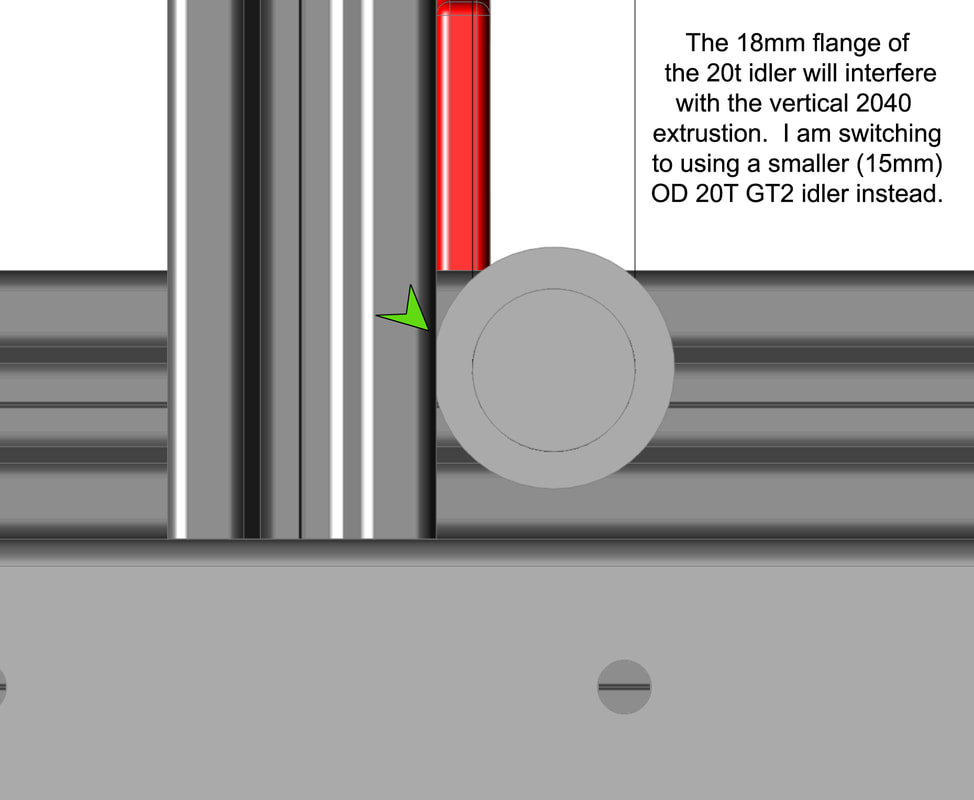
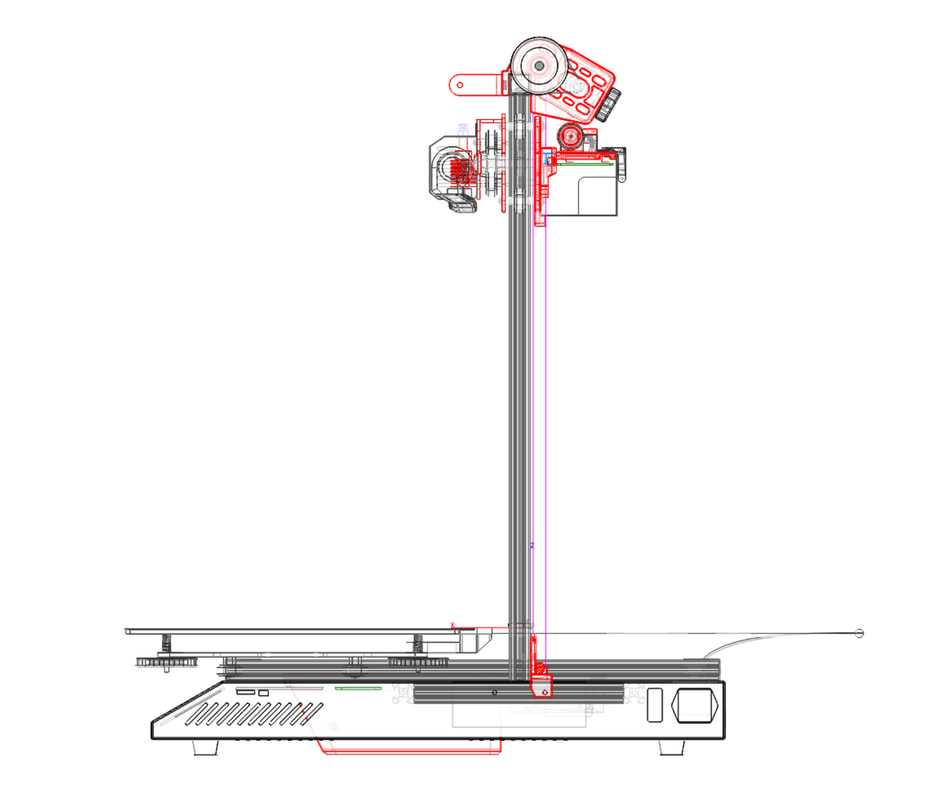
Update 9/16/2022: After printing off some parts it was clear I screwed up. The lower GT2 20 tooth idlers are 18mm in diameter which was too large and would have hit the 2040 extrusion, or I could have moved it slightly but that would screw up the "parallelness" of the belts. I had earlier decided to use the F623 flange bearings as the idlers however I flip flopped back and am planning to use these GT2 20 tooth idlers with a 5mm bore, since they have a smaller outside diameter of 15mm and will allow me to keep the belts as close to perfectly parallel as I can. The different idlers (which now require 5mmx16mm pins) required a re-design of the lower idler holders. I also had to make some changes to the carriages to keep the belts parallel and still have room to adjust the belt tension. But I think its now (really) done, and the belt path looks perfectly parallel in CAD. So now I will be back to re-printing a few parts, and waiting on the idlers to arrive, which fortunately will not take weeks on a boat from China. The pic below shows the issue with the GT2 20t idler with an 18mm flange (which I received as part of the kit). I think, though I am not certain why it is, that this problem is only with my modified design. I don't think it affects the original design, but since I was re-working many of the parts, I just went back and set the belts to parallel and made adjustments where needed to make all the parts line up with the belts. The purple/magenta lines in the 2nd pic represent the center of the belts (where the teeth start), and both the up and down runs of the belts are now parallel, which is helped by using a GT2 20t pulley at the top transmission, and an GT2 20t idler at the bottom. The difference in diameter between the GT2 20t idler/pulley (12mm) and the FT623 flange bearings (10mm but effectively 11.5mm) is only about 0.5mm, so it would not have mattered in the grand scheme of things if I went with the FT623, but using the GT2 20t gears just seems like a nicer way to go (at least right in this design phase :D).
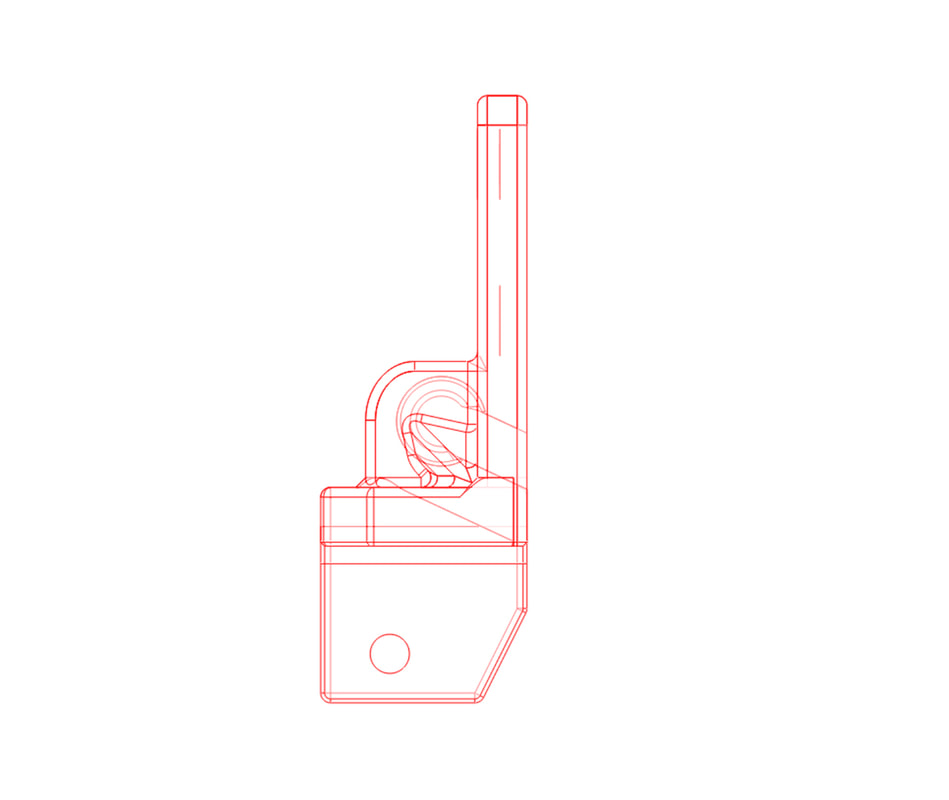
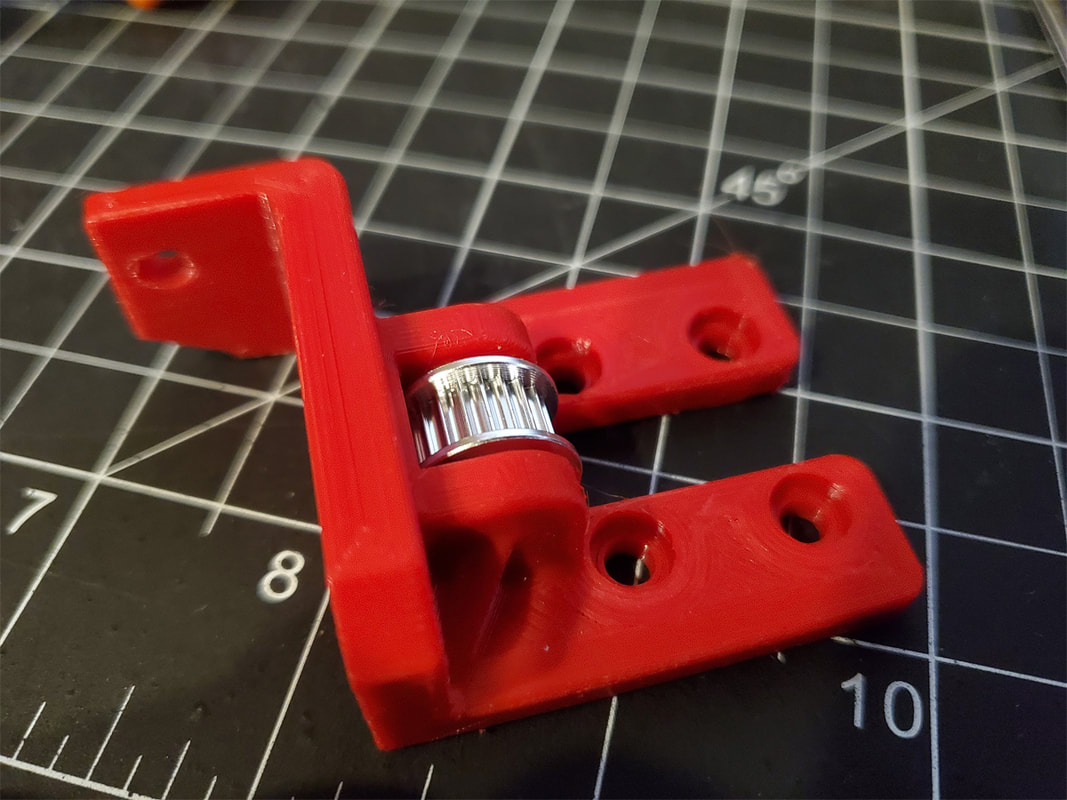
Update 9/18/2022: This took way too long but the lower idler is finally finished, the final design will use an M5x16mm pin with a GT2 20 tooth idler (with a 5mm bore and bearing and 15mm OD). The pin required some force to snap in which I'm fine with, since I want it to be secure (getting this part of the design right took a few tries). I used the handle of a long nose pliers to push the pin in place against a table top. The narrower 15mm OD on the idler fixed multiple issues I had earlier with the alignment on the remix, and there are no interference issues I can see. I'm printing up the left side idler now and then will do the carriages which were also revised previously. I pretty much need to print about every part to do the modification, which is probably for the best since I have too many projects and not enough time as usual. Update 10/1/2022: This project is all printed, but installing and testing is on hold while I print some parts for the voron (on the CR10S Pro). I don't really want to have it apart while I'm still needing parts for other projects. However, I will update here when it is tested and then when the files are posted.
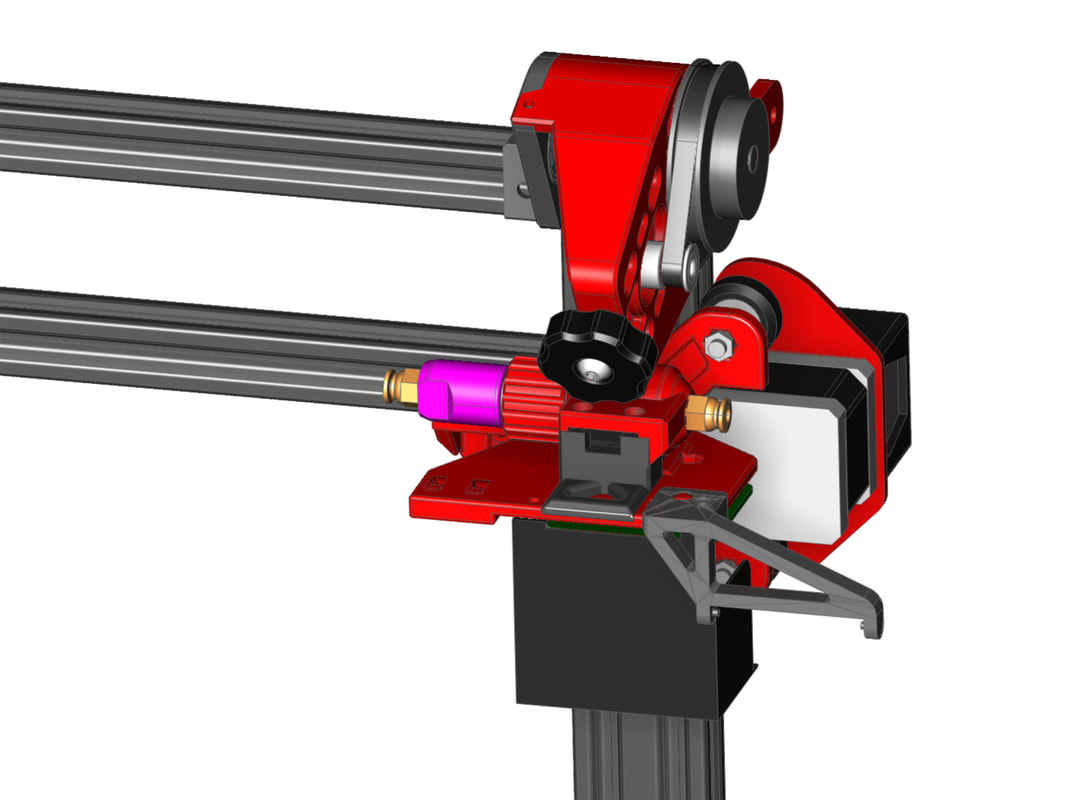
Update 10/8/2022: Just a minor note I forgot to mention about the design. I added some spacers to the 8mm shaft to keep everything in place, I added 2x1mm spacers (8x11 1mm) and a 6mm spacer (M8x16 6mm) on the 8mm shaft, which on this remixed transmission, holds the gear in position on the shaft, and keeps anything from moving side to side. The 6mm spacer is not really necessary, as it sits on the side opposite the large gear (between the belt gear and inboard bearing). I could have also just stacked 6x1mm spacers and skipped buying the 6mm spacers altogether. With the spacers installed, it feels like nothing will move side to side. Update 4/2/2023: Well damn, six months already since the last post, and this project is still on the back burner... Well sort'a. The parts are all printed, but I just have not wanted to tear down my CR10S Pro, which has been a workhorse, to upgrade it with this setup. It will happen, but my primary project is getting my Voron 2.4 built. So this project will be on hold until the Voron is in operation. I'd not mind posting the models to this point as a work in progress if there is any interest. Just know that I cannot test the parts at this time, and would need to have feedback on the design, in exchange for taking the time to post it (as a work in progress). Otherwise it will be posted when I can test it out on my printer. This is just an idea which I'm considering, which modifies a filter I'm currently using in my enclosure, but changes the airflow to recirculate the filtered air back into the printer. It utilizes a HEPA filter for a vacuum cleaner and a box that can hold some activated carbon. It's just a rough model and it was done to see if I could fit it on the back of the Voron printer. I could use one of the existing designs, but I want to have a HEPA filter in addition to the carbon filter (to try and filter some of the ultrafine particles as well as the fumes). The design is very roughed in right now, none of the fancy parts are even started, and it may be too large to consider, but will probably work on it some more before I decide if it's worthwhile. 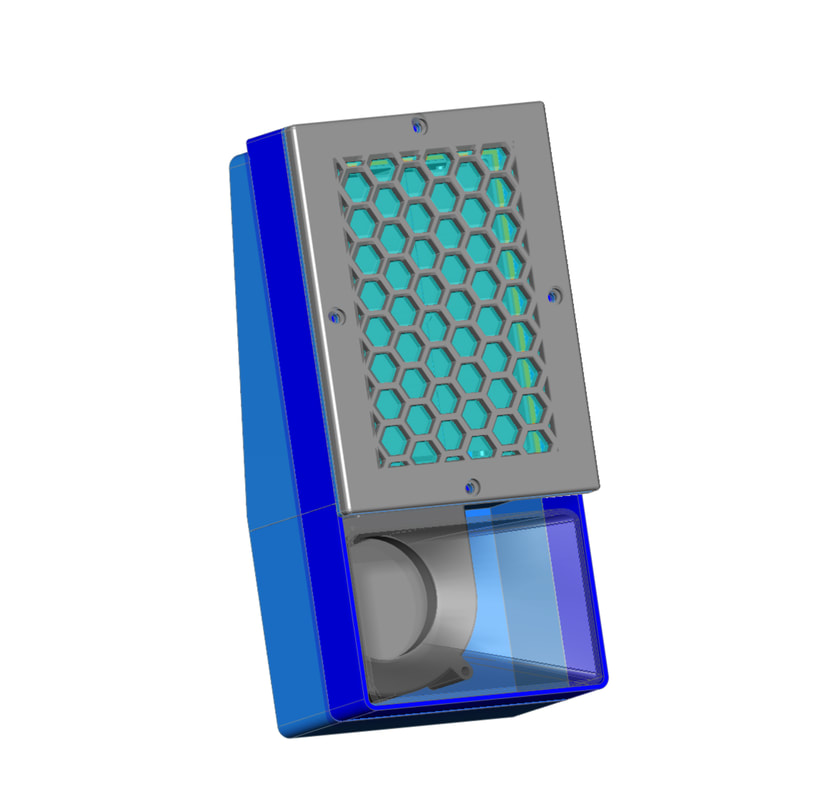 |

Stoopid MeWelcome to my Stoopid corner of teh Internet. It's mostly gonna be 3D printing stuff, but I also post some recipes, projects, and the occasional rant here as well. More Stoopid stuff is updated regularly.  Archives
July 2024
Categories |





























 RSS Feed
RSS Feed
